基于STM32的LoRaWan节点通信#
在LoRa AT指令操作章节中,我们使用LoRa模块上的usb接口与直接与电脑通信,但在实际应用中,通常是用另一个带串口的微控制器发送AT指令来配置RAK3172模块,两者配合工作。或者直接使用LoRa模组工作。本章节我们将学习如何使用实验箱上的STM32开发板发送AT指令配置RAK3172模块,从而完成LoRaWan节点通信实验。
为了方便理解和演示实验效果,本章节通过stm32的串口1与电脑的串口助手通信,通过串口1控制stm32的串口2与LoRa模块通信,进行AT指令配置,让LoRa模块连接上chirpstack。
通信流程如图:

实验目的#
学习AT指令的使用
了解实验箱上的RAK3172模块
实现LoRa连接上chirpstack并通信
准备工作#
硬件#
物联网实验箱、LoRaWan网关
软件#
Serial Port Terminal
实验步骤#
STM32CubeMX创建工程#
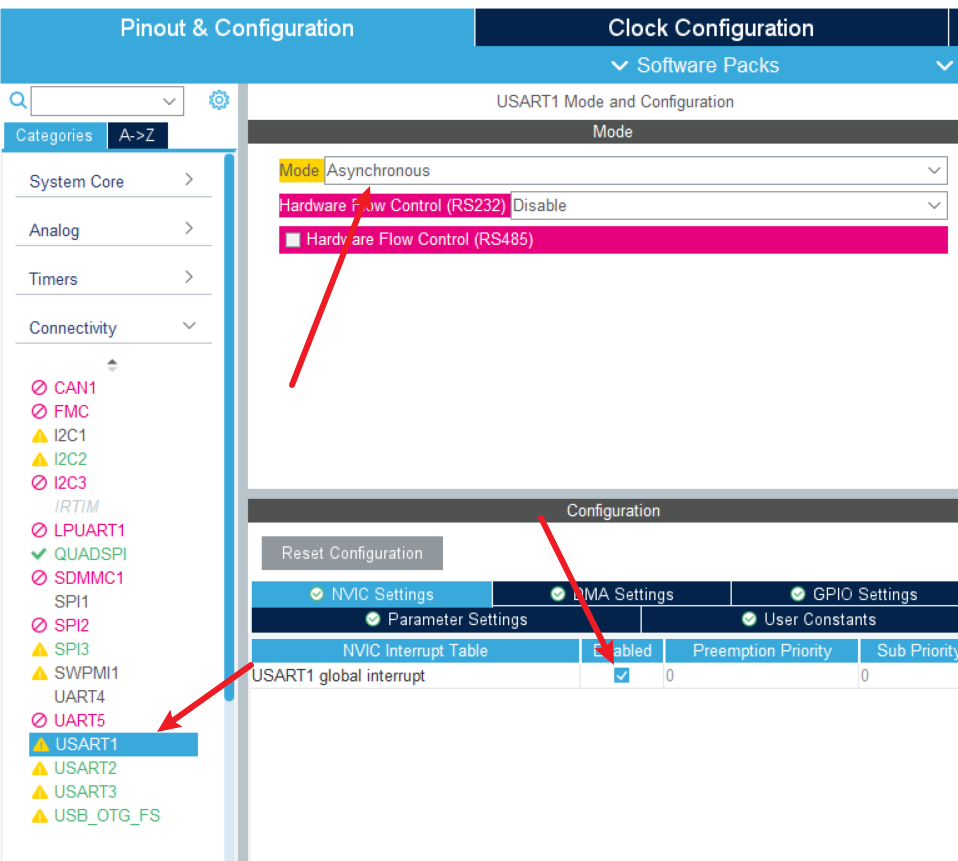
配置usart1和usart2,打开中断(usart2进行同样的配置)
代码编写及运行结果#
包含头文件,定义全局变量等
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes */
//......................................
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define RXBUFFERSIZE 256 //最大接收字节数
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
char Uart1_RxBuffer[RXBUFFERSIZE]; //接收数据
uint8_t Uart1_aRxBuffer; //接收中断缓冲
uint8_t Uart1_Rx_Cnt = 0; //接收缓冲计数
char Uart2_RxBuffer[RXBUFFERSIZE]; //接收数据
uint8_t Uart2_aRxBuffer; //接收中断缓冲
uint8_t Uart2_Rx_Cnt = 0; //接收缓冲计数
/* USER CODE END PM */
//......................................
先调用一次中断接受函数
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1, (uint8_t *)&Uart1_aRxBuffer, 1);
HAL_UART_Receive_IT(&huart2, (uint8_t *)&Uart2_aRxBuffer, 1);
/* USER CODE END 2 */
重定向串口中断回调函数
/* USER CODE BEGIN 4 */
//可接收不定长度的数据,以\r\n为结束位,收到的数据存在Uart1_RxBuffer中
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_UART_TxCpltCallback could be implemented in the user file
*/
// uart1
if(huart->Instance == USART1){
if(Uart1_Rx_Cnt >= 255) //溢出判断
{
Uart1_Rx_Cnt = 0;
memset(Uart1_RxBuffer, 0x00, sizeof(Uart1_RxBuffer));
HAL_UART_Transmit(&huart1, (uint8_t *)"数据溢出\r\n", 10,0xFFFF);
}
else
{
Uart1_RxBuffer[Uart1_Rx_Cnt++] = Uart1_aRxBuffer; //接收数据转存
//0x0A 是 \r 的 ASCII码,0x0D 是 \n 的 ASCII码
if((Uart1_RxBuffer[Uart1_Rx_Cnt - 1] == 0x0A) && (Uart1_RxBuffer[Uart1_Rx_Cnt - 2] == 0x0D)) //判断结束位,以\r\n结尾为一组数据
{
/*
HAL_UART_Transmit(&huart1, (uint8_t *)&Uart1_RxBuffer, Uart1_Rx_Cnt, 0xFFFF); //将收到的信息发送出去
while(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
*/
// 将uart1接收到的内容发送给uart2
HAL_UART_Transmit(&huart2, (uint8_t *)&Uart1_RxBuffer, Uart1_Rx_Cnt, 0xFFFF); //将收到的信息发送出去
while(HAL_UART_GetState(&huart2) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
Uart1_Rx_Cnt = 0;
memset(Uart1_RxBuffer, 0x00, sizeof(Uart1_RxBuffer)); //清空数组
}
}
}
// uart2
if(huart->Instance == USART2){
if(Uart2_Rx_Cnt >= 255) //溢出判断
{
Uart2_Rx_Cnt = 0;
memset(Uart2_RxBuffer, 0x00, sizeof(Uart2_RxBuffer));
HAL_UART_Transmit(&huart1, (uint8_t *)"数据溢出\r\n", 10,0xFFFF);
}
else
{
Uart2_RxBuffer[Uart2_Rx_Cnt++] = Uart2_aRxBuffer; //接收数据转存
//0x0A 是 \r 的 ASCII码,0x0D 是 \n 的 ASCII码
if((Uart2_RxBuffer[Uart2_Rx_Cnt - 1] == 0x0A) && (Uart2_RxBuffer[Uart2_Rx_Cnt - 2] == 0x0D)) //判断结束位,以\r\n结尾为一组数据
{
/*
HAL_UART_Transmit(&huart2, (uint8_t *)&Uart2_RxBuffer, Uart2_Rx_Cnt, 0xFFFF); //将收到的信息发送出去
while(HAL_UART_GetState(&huart2) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
*/
// 将uart1接收到的内容发送给uart2
HAL_UART_Transmit(&huart1, (uint8_t *)&Uart2_RxBuffer, Uart2_Rx_Cnt, 0xFFFF); //将收到的信息发送出去
while(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
Uart2_Rx_Cnt = 0;
memset(Uart2_RxBuffer, 0x00, sizeof(Uart2_RxBuffer)); //清空数组
}
}
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&Uart1_aRxBuffer, 1); //再次调用中断接收函数
HAL_UART_Receive_IT(&huart2, (uint8_t *)&Uart2_aRxBuffer, 1); //再次调用中断接收函数
}
/* USER CODE END 4 */
实验步骤
打开串口调试助手,发送想要发送的AT指令。以下是让Lora连接上chirpstack的AT指令,具体功能和参数请到官网查询,最需要注意的是DEVEUI和APPKEY,APPEUI没用到的话,跟DEVEUI一致即可。
查询固件版本:AT+VER=?\r\n
配置网络加入模式,0为ABP模式,1为OTAA模式:AT+NJM=1
配置区域频段,1为CN470,中国所用的频段:AT+BAND=1
设置信道掩码:AT+MASK=0400
设置节点工作模式为A:AT+CLASS=A
配置设备EUI:AT+DEVEUI=2022060615490001
配置应用程序标识符:AT+APPEUI=2022060615490001
配置应用程序密钥:AT+APPKEY=20220606154911112222333344445555
配置确认模式:AT+CFM=1
让Lora发出加入网络请求:AT+JOIN=1:0:10:8
让Lora发送数据:AT+SEND=22:12345678
每发送一条AT指令,Lora模块的返回数据都会在串口助手上显示,即可判断Lora模块是否成功接收到AT指令,或者根据返回的信息判断是否成功加入网络,发送数据等。此外,若是使能了Lora模块的命令回显功能,发送的AT指令会一起返回。
本次实验到此结束,然而,在实际使用的时候,不可能这样通过人为的形式来判断AT指令是否成功发送和根据Lora的返回判断Lora模块是否成功接收AT指令,而是需要通过编写程序来实现AT指令解析的。大概的功能就是stm32发送AT指令,然后根据Lora模块的返回值来判断Lora模块是否正确地接受到AT指令,在传输数据量比较大的时候,更是需要合理编写串口收发程序,避免溢出和错误,这方面的内容将在以后的章节讲解。